



近期,自動(dòng)駕駛無疑已經(jīng)成為科技圈和汽車圈的熱點(diǎn)話題,谷歌、百度、蘋果及Uber等科技公司,特斯拉、奧迪、奔馳、寶馬等主流汽車廠商紛紛投入自動(dòng)駕駛領(lǐng)域。然而,關(guān)于自動(dòng)駕駛技術(shù)路線之爭也一直沒有停止過。據(jù)了解,在不同技術(shù)路線中,所使用到的傳感器主要有激光雷達(dá)、毫米波雷達(dá)以及攝像頭三類,且各具優(yōu)缺點(diǎn)。

激光雷達(dá)主導(dǎo)的解決方案未來可以沿如下兩個(gè)方向繼續(xù)推進(jìn)商業(yè)化進(jìn)程:
一、主流傳感器對(duì)比
激光雷達(dá):
激光雷達(dá)具有高精度、高分辨率的優(yōu)勢(shì),同時(shí)具有建立周邊3D模型的前景,然而其劣勢(shì)在于對(duì)靜止物體如隔離帶的探測較弱且目前技術(shù)落地成本高昂。由于激光雷達(dá)可廣泛應(yīng)用于ADAS系統(tǒng),例如自適應(yīng)巡航控制(ACC)、前車碰撞警示(FCW)及自動(dòng)緊急制動(dòng)(AEB),因此吸引了不少具有先進(jìn)技術(shù)的初創(chuàng)公司競爭,同時(shí)傳統(tǒng)供應(yīng)商也積極布局投資希望能夠達(dá)成戰(zhàn)略合作關(guān)系以便快速獲得先進(jìn)技術(shù)。
毫米波雷達(dá):
與激光雷達(dá)相比,毫米波雷達(dá)具有探測距離遠(yuǎn),不受天氣狀況影響以及成本低的優(yōu)勢(shì)。由于毫米波雷達(dá)采用硅基芯片,不會(huì)特別昂貴,也不涉及復(fù)雜工藝,同時(shí)正處于第二次工藝轉(zhuǎn)型的重要時(shí)期,預(yù)計(jì)成本仍有下降空間。
相比激光雷達(dá)暫時(shí)高不可攀的成本以及較低的技術(shù)壁壘和自身可全天候工作的優(yōu)勢(shì),毫米波雷達(dá)可以說是目前初創(chuàng)公司進(jìn)入自動(dòng)駕駛市場的一個(gè)門檻較低的入口。
攝像頭:
車載攝像頭是最基本常見的傳感器,價(jià)格低廉且應(yīng)用廣泛同時(shí)具備雷達(dá)無法完成的圖像識(shí)別功能,不僅可以識(shí)別路牌,在自動(dòng)駕駛系統(tǒng)的圖像處理方案中也是不可或缺的一部分。
鑒于目前激光雷達(dá)的高成本,攝像頭配合高精度地圖是另一種較低成本的技術(shù)路線。除了與高精度地圖配合為自動(dòng)駕駛提供定位服務(wù),攝像頭還可以在地圖采集過程中作為低成本且數(shù)據(jù)傳輸量?。〝z像頭捕捉的是小尺寸的2D畫面)的數(shù)據(jù)收集器。
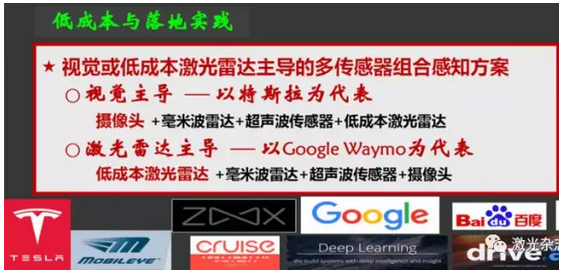
二、視覺主導(dǎo)還是激光雷達(dá)主導(dǎo)?
據(jù)清華大學(xué)鄧志東教授介紹,自動(dòng)駕駛環(huán)境感知的技術(shù)路線主要有兩種:一種是以特斯拉為代表的視覺主導(dǎo)的多傳感器融合方案,另一種以低成本激光雷達(dá)為主導(dǎo),典型代表如谷歌Waymo。
1、視覺主導(dǎo),以特斯拉為代表:攝像頭+毫米波雷達(dá)+超聲波雷達(dá)+低成本激光雷達(dá)。
攝像頭視覺屬于被動(dòng)視覺,受環(huán)境光照的影響較大,目標(biāo)檢測與SLAM較不可靠,但成本低。目前,特斯拉已經(jīng)在其量產(chǎn)車上列裝了Autopilot 2.0固件,而且成本較低,只有7000美金左右,8個(gè)攝像頭組成單目環(huán)視,有1個(gè)毫米波雷達(dá)和12個(gè)超聲波雷達(dá),希望從L2跳躍到L4。
經(jīng)過半年的努力,特斯拉近期已經(jīng)完成了將路測大數(shù)據(jù)從Mobileye單目視覺技術(shù)過渡到基于Nvidia Drive PX2計(jì)算硬件平臺(tái)的特斯拉Vision軟件系統(tǒng)上,并且在今年3月底發(fā)布了8.1軟件版本,它用深度學(xué)習(xí)的方法在短期內(nèi)基本達(dá)到了Mobileye的技術(shù)水平,這是以前很難想象的。特斯拉的自動(dòng)駕駛技術(shù)究竟怎么樣,一個(gè)重要的觀察點(diǎn)就是看它能否在2017年年底,如期從洛杉磯開到紐約,實(shí)現(xiàn)全程4500公里且無人工干預(yù)的完全自主駕駛。
2、激光雷達(dá)主導(dǎo),以Google Waymo為代表:低成本激光雷達(dá)+毫米波雷達(dá)+超聲波傳感器+攝像頭。
激光雷達(dá)是主動(dòng)視覺,它的目標(biāo)檢測與SLAM比較可靠,但是卻丟失了顏色和紋理且成本高昂。目前谷歌Waymo自己組建團(tuán)隊(duì)研發(fā)激光雷達(dá)的硬件,把成本削減了90%以上,基本上是7000美金左右,同時(shí)他們已經(jīng)開始在美國鳳凰城地區(qū)對(duì)500輛L2級(jí)別的車進(jìn)行社會(huì)公測,大大地推進(jìn)了該類技術(shù)路線的落地實(shí)踐。
激光雷達(dá)主導(dǎo)的解決方案未來可以沿如下兩個(gè)方向繼續(xù)推進(jìn)商業(yè)化進(jìn)程:
一個(gè)是發(fā)展攝像頭與激光雷達(dá)的硬件模組,把兩者結(jié)合起來,既有激光雷達(dá),又有彩色攝像頭,可以直接獲得彩色激光點(diǎn)云數(shù)據(jù)。
另一個(gè)是進(jìn)一步降低激光雷達(dá)的硬件成本,比如研發(fā)固態(tài)激光雷達(dá)并真正實(shí)現(xiàn)產(chǎn)業(yè)化,屆時(shí)成本會(huì)下降到幾百美金。
總之,現(xiàn)在自動(dòng)駕駛領(lǐng)域有三大核心問題需要著力突破:即利用人工智能,尤其是利用深度學(xué)習(xí)進(jìn)行目標(biāo)識(shí)別、自主導(dǎo)航和信息融合,這三方面的技術(shù)成果是真正具有商業(yè)價(jià)值的。
目標(biāo)識(shí)別:例如對(duì)交通流稠密的復(fù)雜城區(qū),如何可靠地進(jìn)行周邊障礙物的檢測與行為預(yù)測,特別是對(duì)極端與緊急情況的感知與預(yù)測。
自主導(dǎo)航:激光SLAM或視覺SLAM及其與低成本組合導(dǎo)航的精準(zhǔn)融合;
信息融合:多傳感器如何進(jìn)行信息融合。
三、未來的趨勢(shì)是什么?
目前,由于各種原因,不同廠商對(duì)于自動(dòng)駕駛技術(shù)路線仍有爭議,所采用的傳感器組合方式也有側(cè)重。但是,對(duì)于未來發(fā)展趨勢(shì),業(yè)內(nèi)主流觀點(diǎn)認(rèn)為毫米波雷達(dá)、激光雷達(dá)以及攝像頭等多種傳感器的融合才是實(shí)現(xiàn)自動(dòng)駕駛的必由之路。顯然,以色列創(chuàng)業(yè)公司Innoviz CEO兼聯(lián)合創(chuàng)始人Omer David Keilaf也是這種觀點(diǎn)的支持者。
他認(rèn)為,將毫米波雷達(dá)、攝像頭、激光雷達(dá)等傳感器數(shù)據(jù)融合的技術(shù),對(duì)于保證車輛對(duì)周邊環(huán)境的全局定位和理解是至關(guān)重要的,且為Level 3-Level 5級(jí)自動(dòng)駕駛方案的實(shí)現(xiàn)提供了必要的技術(shù)儲(chǔ)備。在環(huán)境感知中,每一種傳感器都有獨(dú)特的優(yōu)勢(shì)和弱點(diǎn)。例如,毫米波雷達(dá)可在低分辨率情況下完成測距,且受天氣因素影響小;而攝像頭有更高的分辨率,能夠感知顏色,但受強(qiáng)光影響較大;激光雷達(dá)則能夠提供三維尺度感知信息,對(duì)環(huán)境的重構(gòu)能力更強(qiáng)。
在這種前提下,只有幾種傳感器的融合才能提供車輛周圍環(huán)境更精準(zhǔn)的繪圖信息,并達(dá)到OEM主機(jī)廠所需的安全標(biāo)準(zhǔn)。目前,高性能激光雷達(dá)的量產(chǎn)和成本問題,仍是通往多傳感器融合技術(shù)方案,乃至完全自動(dòng)駕駛的障礙之一。
轉(zhuǎn)載請(qǐng)注明出處。

 相關(guān)文章
相關(guān)文章
 熱門資訊
熱門資訊
 精彩導(dǎo)讀
精彩導(dǎo)讀
















 關(guān)注我們
關(guān)注我們