



2015 年,當(dāng)時業(yè)界還在爭論:無人駕駛是該用激光雷達(dá)還是用攝像頭。到 2016 年,事情發(fā)生很大的轉(zhuǎn)變,尤其某汽車公司 Autopilot 致死事故之后,業(yè)內(nèi)漸漸覺得激光雷達(dá)是非常重要的。

激光雷達(dá)是自動駕駛不可或缺的傳感器
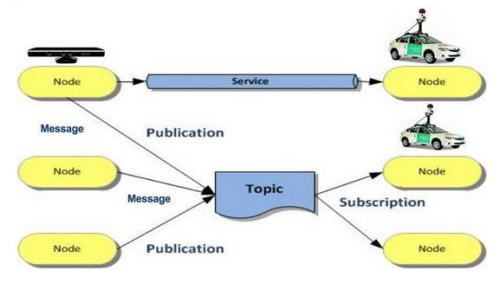
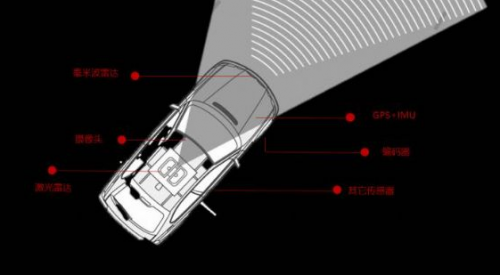
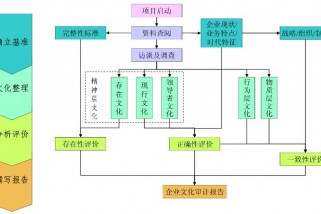
下圖是無人駕駛的偏算法層的系統(tǒng)框架。從左邊看,這是一個傳感器的輸入,如激光雷達(dá)、攝像頭、毫米波、GPS、編碼器和 IMU。這些傳感器的數(shù)據(jù)輸入到系統(tǒng)的感知算法里,對于這個感知算法,我們會將這些數(shù)據(jù)進(jìn)行處理分析,如何將靜態(tài)的物體分離出來,并如何識別、分類與跟蹤動態(tài)物體。
無人駕駛的偏算法層的系統(tǒng)框架
高精度地圖的獲取很大程度依賴激光雷達(dá)以及攝像頭。我們獲取高精度地圖后,結(jié)合 GPS 和 IMU、編碼器、實時感知環(huán)境的特征,進(jìn)行地圖匹配進(jìn)行定位。對于路徑規(guī)劃和運(yùn)動控制,最終是結(jié)合車輛的 CAN 總線,對車進(jìn)行控制。
在感知方面,我們普遍使用的是激光雷達(dá)、攝像頭、毫米波雷達(dá)三個是作為感知外界物體的傳感器。其中,激光雷達(dá)可以做物體的識別、分類、跟蹤,攝像頭也可以做物體的分類和跟蹤。毫米波雷達(dá)主要用于對物體障礙物識別。
毫米波雷達(dá)、攝像頭和激光雷達(dá)這三個傳感器,有一些重合點(diǎn)。這是由傳感器本身的性質(zhì)決定,他們有各自不可或缺的功能。
毫米波雷達(dá)主要用還是在障礙物檢測;攝像頭很難得到三維物體的模型,包括它對于環(huán)境的干擾也比較依賴這個光照的影響,但攝像頭對物體分類和跟蹤是非常好的;激光雷達(dá)普遍用于定位、障礙物檢測、物體分類、動態(tài)物體跟蹤等應(yīng)用。
其實在 2016 年之前,激光雷達(dá)行業(yè)的發(fā)展還是比較緩慢的。但現(xiàn)在來看,包括上游供應(yīng)商和下游客戶的緊迫需求,我們極力希望推動實現(xiàn)激光雷達(dá)降成本化、可量產(chǎn)化。
我把激光雷達(dá)目前分成兩類:掃描式激光雷達(dá)和非掃描式激光雷達(dá)。
1、掃描式激光雷達(dá)
機(jī)械式旋轉(zhuǎn)激光雷達(dá)(發(fā)射、接收、共軸旋轉(zhuǎn)的激光雷達(dá)),這是目前比較成熟的,在下游無人駕駛使用比較多的方案。比較有代表性的有 Velodyen、Ibeo,包括我們現(xiàn)在在量產(chǎn)的也是這種機(jī)械式的激光雷達(dá)?;旌瞎虘B(tài)也是機(jī)械式旋轉(zhuǎn)類的激光雷達(dá)。
另外一種是 MEMS。基于 MEMS 的掃描式雷達(dá)目前屬于在研狀態(tài),它的原理是通過 MEMS 掃描鏡來改變光路。
還有一種是相控陣激光雷達(dá)(OPA),其實也屬于掃描式激光雷達(dá),因為它是通過逐點(diǎn)掃描的方式,即多個小天線之間發(fā)射的激光的發(fā)射相位來改變光路而實現(xiàn)的。
2、非掃描式激光雷達(dá)
Flash LiDAR 是發(fā)掃描式激光雷達(dá),發(fā)射的就是一個面陣的光,如瑞士的 Ledder Tech 研發(fā)就是 Flash liDAR 這類產(chǎn)品。
目前來看,其實行業(yè)現(xiàn)在的推動力挺大的,包括我們自己,主要的研發(fā)精力也放在固態(tài)激光雷達(dá)上。我相信很快大家能看到這種低成本的激光雷達(dá),從研發(fā)、樣品到商用,可能會比原來預(yù)想的周期更快。因為不是一家激光雷達(dá)公司在努力,而是整個產(chǎn)業(yè)鏈都在努力。
點(diǎn)云是在同一空間倡導(dǎo)系下表達(dá)目標(biāo)空間分布和目標(biāo)表面特性的海量點(diǎn)云數(shù)據(jù)。
點(diǎn)云數(shù)據(jù)生成設(shè)備可以由激光雷達(dá)或者深度相機(jī)產(chǎn)生。根據(jù)激光雷達(dá)得到的點(diǎn)云,包括三維坐標(biāo)(XYZ)和激光反射強(qiáng)度(Intensity)。
激光雷達(dá)在自動駕駛中的應(yīng)用:定位
激光雷達(dá)在自動駕駛中的應(yīng)用,最重要部分還是定位:位置確定了,無人車才知道要去哪里、以及怎么去。所以,確定“我在哪里”是第一步,也是非常關(guān)鍵的一步。
現(xiàn)在定位用 RTK,差分 GPS ,也有用激光雷達(dá)或者視覺去做。但 RTK 還是會受信號的干擾。特別是在一些城市、建筑和樹比較多的地方,以及進(jìn)隧道、出隧道,它的信號容易中斷。
還有一個是基于視覺定位,它其實對于跟他視覺本身的特性有關(guān),對環(huán)境的依賴比較強(qiáng),比如逆光或雨雪天氣下,這種定位容易失效。
激光雷達(dá)的定位,我們通過 IMU、慣性導(dǎo)航系統(tǒng)、編碼器和 GPS,得到一個預(yù)測的全局位置。當(dāng)激光雷達(dá)實時掃描單次的點(diǎn)云數(shù)據(jù)后,我們會去結(jié)合單次的點(diǎn)云數(shù)據(jù)進(jìn)行匹配,并進(jìn)行特征提取。
這些特征包括路沿、車道線等周圍點(diǎn)線面的特征。對于高精度地圖,提取過特征與實時提取的特征進(jìn)行匹配,最終得到精準(zhǔn)的車本體速度,這是激光雷達(dá)的定位過程。
激光雷達(dá)的第二個應(yīng)用:障礙物的檢測和分類。
對于障礙物檢測和分類來講,目前有應(yīng)用視覺和激光雷達(dá),這兩者并沒有沖突。激光雷達(dá)不依賴光照,它的視角是 360 度,計算量比較小,可以實時掃描,目前普遍用的是 100 毫秒以內(nèi)的。激光雷達(dá)在掃描的過程中,先識別障礙物,知道這個障礙物在空間中的位置,再根據(jù)存在的障礙物做分類。
如上圖,我們先拿到一個原始點(diǎn)云數(shù)據(jù),對地面點(diǎn)進(jìn)行提取,對非地面點(diǎn)進(jìn)行障礙物分割。
比如車、人,我們將這些障礙物分割成為獨(dú)立的個體,通過分割出來獨(dú)立的個體再去匹配,從而進(jìn)行障礙物的分類和物體的跟蹤。
簡單言之,我們先去除地面點(diǎn),得到障礙物,分割出障礙物,然后把障礙物分割出來從而進(jìn)行分類跟蹤。
而跟蹤的過程,首先是分割點(diǎn)云,通過點(diǎn)云做關(guān)聯(lián)目標(biāo),我們知道上一楨和下一楨是否屬于同一個物體,再進(jìn)行目標(biāo)跟蹤,輸出目標(biāo)跟蹤信息。
激光雷達(dá)的應(yīng)用現(xiàn)狀
今年 4 月份我們開始供貨,目前也了解到行業(yè)激光雷達(dá)在應(yīng)用上現(xiàn)狀。
首先就是傳感器缺乏,一方面是現(xiàn)在的激光雷達(dá)比較貴,供貨周期也非常長,能夠普遍用起激光雷達(dá)的公司并不多。而傳感器的缺乏,解決方案的不成熟、點(diǎn)云算法人才積累太少,激光雷達(dá)無法發(fā)揮最大威力。
對于無人駕駛團(tuán)隊,他們可能除了激光雷達(dá)的點(diǎn)云算法以外,還做攝像頭算法、毫米波雷達(dá)算法以及多傳感器的融合,包括定位、路徑規(guī)劃、決策控制和改車等等。他們做的技術(shù)點(diǎn)非常多,無法聚焦,這導(dǎo)致他們被迫拉長戰(zhàn)線。
所以在今年 4 月,我們針對激光雷達(dá)的解決方案提出了普爾米修斯計劃。我們希望這個計劃的本質(zhì)是一個負(fù)責(zé)開放共享的態(tài)度,加快整個無人駕駛商業(yè)化落地。
整個普羅米修斯計劃的模塊還是基于激光雷達(dá)能夠做什么事來進(jìn)行的,包括:定位、車道線檢測、路沿檢測、障礙物識別、障礙物分類與跟蹤的算法模塊。
不管是低速車,園區(qū)車還是物流車或是在高速公路上行駛的車輛,我們都希望自己能夠貢獻(xiàn)出一份力量。
上圖是基于激光雷達(dá)車道線檢測和路沿檢測。基于激光雷達(dá)的車道線檢測還是比較不錯的,路面上車道線一般是白色和黃色兩種,所以我們提前把反射強(qiáng)度的方式先做出來,這樣激光雷達(dá)就很容易將提取車道線出來,不會因為白天和晚上受到干擾。
而路沿檢測可以根據(jù)路沿的幾何形狀來做一些訓(xùn)練,現(xiàn)在路沿十幾厘米的高度都能夠提取出來。
我們可以看上圖的有半部分:紅色表示提取的車道線,淺色是提取的路沿,中間是虛線,兩邊是實線。這個準(zhǔn)確性還是不錯的,包括路面的左轉(zhuǎn)、右轉(zhuǎn)這些指示也能做出來。如果后續(xù)有多幀迭代的話,其實效果會更好。
激光雷達(dá)做物體的跟蹤,相當(dāng)于對每一個識別到的物體,都會計算,并且分割到底是自行車、卡車、行人還是私家車。
識別之后,除了我們知道自動駕駛本體車的速度以外,也可以跟蹤出前車的速度,以及前車距離本車的橫向和縱向距離。激光雷達(dá)輸出的已經(jīng)不是原始點(diǎn)云數(shù)據(jù),還有每個障礙物空間的位置和分類,到底是哪種類型,以及速度信息。
激光雷達(dá)能做的事情有很多,包括定位、障礙物的檢測、分類和跟蹤、車道線的檢測、路沿檢測等等。在感知的工作里,激光雷達(dá)扮演了非常重要的角色。
轉(zhuǎn)載請注明出處。

 相關(guān)文章
相關(guān)文章
 熱門資訊
熱門資訊
 精彩導(dǎo)讀
精彩導(dǎo)讀
















 關(guān)注我們
關(guān)注我們