





光線計(jì)算是光學(xué)設(shè)計(jì)的基本問題之一,其目的在于解決光線經(jīng)光學(xué)系統(tǒng)后的位置(高斯光學(xué)性能)和光束結(jié)構(gòu)特性(像差特性),以判斷像差理論運(yùn)用的正確性、光學(xué)系統(tǒng)各個(gè)變數(shù)改變過程是否恰當(dāng),以及光學(xué)系統(tǒng)的成像質(zhì)量。
經(jīng)過光線計(jì)算后,可繪制光路圖、了解光線在光學(xué)系統(tǒng)中的各個(gè)入射面(或反射面)上的位置、入射方向和出射方向等信息。在光學(xué)設(shè)計(jì)軟件中可以通過對光線追跡,運(yùn)用一些算法處理,實(shí)現(xiàn)對一些特殊結(jié)構(gòu)參數(shù)的控制,完成光學(xué)系統(tǒng)的邊界約束。也可根據(jù)一些光學(xué)系統(tǒng)的特殊性能要求,進(jìn)行多條光線追跡,按照一定的算法獲取所需的光學(xué)性能,并以此作為評價(jià)函數(shù)對光學(xué)結(jié)構(gòu)進(jìn)行優(yōu)化。
1 參考光線的定義
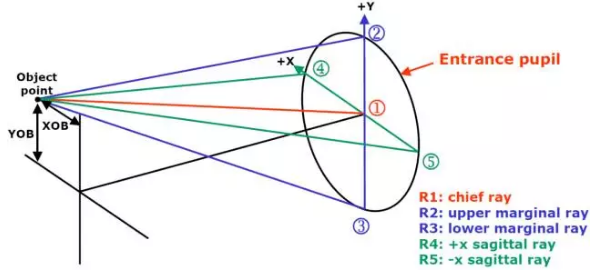
在光學(xué)設(shè)計(jì)軟件CODE V中,進(jìn)行光線追跡時(shí),對光束定義了5種參考光線,R1中心光線、R2子午上邊緣光線、R3子午下邊緣光線、R4弧矢邊緣光線(+x)、R5弧矢邊緣光線(-x),如圖1所示。通過計(jì)算這五種參考光線的軌跡,可以比較全面地反映光學(xué)系統(tǒng)的結(jié)構(gòu)參數(shù)
圖1 參考光線定義
2 優(yōu)化中的光線控制
下面以光學(xué)設(shè)計(jì)軟件CODE V為例,在優(yōu)化過程中如何實(shí)現(xiàn)對一個(gè)四離軸反射鏡結(jié)構(gòu)參數(shù)的控制。
根據(jù)軟件中坐標(biāo)系的規(guī)定,線段從左向右為正,由下向上為正,反之為負(fù);角度以光軸為基準(zhǔn)逆時(shí)針為正,順時(shí)針為負(fù);曲面以中心點(diǎn)在頂點(diǎn)的右邊為正,反之為負(fù)。軟件中,在菜單分析(Analsysis)/診斷(Diagnosties)/真實(shí)光線追跡(Real Ray Trace)中可以計(jì)算任意一條光線在設(shè)計(jì)波長下通過光學(xué)系統(tǒng)的路徑信息。用命令X|Y|Z|L|M|N|AOI|AOR| [Sk] [Zn] [Fm] [Wj] [Gj] [Ri]可以計(jì)算某條光線在指定光學(xué)表面上的位置和方向。其中X,Y,Z表示光線在光學(xué)表面上的坐標(biāo);L,M,N表示光線經(jīng)過光學(xué)表面后的光學(xué)方向的余弦;AOI表示入射角度;AOR表示折射角度;Sk表示第k個(gè)光學(xué)表面;Zn表示第n重光學(xué)結(jié)構(gòu);Fm表示第m個(gè)視場;Wj表示第j個(gè)參考波長;Gj表示以第j個(gè)光學(xué)表面的頂點(diǎn)為全局坐標(biāo)的原點(diǎn);Ri表示參考光線的名稱。
對于一些非共軸光學(xué)系統(tǒng),由于含有偏心和傾斜光學(xué)元件,在優(yōu)化過程時(shí),如果不對光線進(jìn)行控制,往往會(huì)產(chǎn)生漸暈或遮擋視場的情況,不能得到一個(gè)滿足結(jié)構(gòu)和性能要求的光學(xué)結(jié)構(gòu)。因此,需要將光學(xué)元件(或鏡框)的外沿與光線保持一定的空隙。
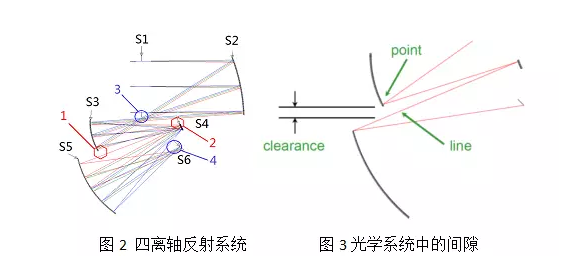
如圖2所示,在一個(gè)四離軸反射系統(tǒng)中,按照遮擋光線對視場和通光孔徑產(chǎn)生的影響分成兩類空隙。第一類,在該區(qū)域如果發(fā)生光線遮擋將會(huì)影響通光孔徑,產(chǎn)生漸暈,如圖2中序號1和2所指示的空隙;第二類,在該區(qū)域的光線產(chǎn)生會(huì)聚,如果發(fā)生光線的遮擋將會(huì)影響系統(tǒng)的視場,如圖2中序號3和4所指示的空隙。
1第一類空隙的計(jì)算
第一類空隙是指光學(xué)元件的外沿與某視場邊緣光線的距離。如圖3所示,在一個(gè)平面內(nèi),光學(xué)元件的外沿可以看成一個(gè)點(diǎn)(Point),邊緣光線看成一條直線(Line),點(diǎn)到線的距離就是空隙(clearance)。
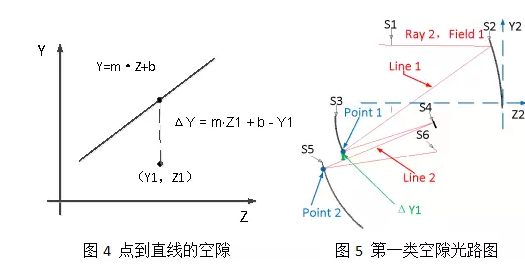
空隙的尺寸可以根據(jù)平面幾何的方法來計(jì)算,如圖4所示,在Y-Z平面內(nèi),直線可用公式(1)來表示:Y=m·Z+b(1),
其中m是直線的斜率,b是直線在Y軸上的截距。
點(diǎn)的坐標(biāo)為(Y1,Z1),點(diǎn)到直線的空隙ΔY的計(jì)算公式為:ΔY= m·Z1+ b-Y1(2)。
在計(jì)算空隙前,首先要判斷是哪一條光線對空隙產(chǎn)生影響。圖2所示的四離軸反射系統(tǒng)中,在Y-Z平面內(nèi)產(chǎn)生空隙,因此只考慮Y-Z平面內(nèi)的光線。
設(shè)置系統(tǒng)的視場1(F1)為-0.75°,視場2(F2)為0°,視場3(F3)為-0.75°;三條參考光線為:中心光線R1、子午上邊緣光線R2、子午下邊緣光線R3;光闌面為S1,反射表面為S2、S3、S4、S5,像面為S6;反射表面S2的頂點(diǎn)為全局坐標(biāo)系的原點(diǎn);計(jì)算波長為中心波長。
圖2中序號1所指示的空隙可按照圖5所示的光路進(jìn)行計(jì)算。對視場F1的子午上邊緣光線R2進(jìn)行光線追跡,光線在表面S3上的交點(diǎn)為點(diǎn)1(Point 1),經(jīng)表面S4反射后的光線為直線2(Line 2)。點(diǎn)1到直線2在Y向的距離就是空隙ΔY1。
直線2可以用公式(1)表示,斜率m等于表面S4出射光線在Z軸方向上的正切值,該正切值等于表面S4出射光線在Y光學(xué)方向余弦與Z光學(xué)方向余弦的比值。在光學(xué)軟件中表面S4出射光線的Y光學(xué)方向余弦用(MR2 F1 S4 G2)表示,Z光學(xué)方向余弦用(NR2 F1 S4 G2)表示,經(jīng)過下列符合軟件語法要求的命令來計(jì)算參數(shù)m(用@SL_m1表示)。
@SL_m1 == (MR2 F1 S4 G2) / (NR2 F1 S4 G2)
根據(jù)光線R2在表面S5上坐標(biāo)(Y R2 F1 S5 G2),(Z R2 F1 S5 G2)和直線公式(1)計(jì)算截距b(用@b1表示)。
@b1 == (YR2 F1 S5 G2) - @SL_m1*(ZR2 F1 S5 G2)
根據(jù)公式(2)計(jì)算空隙ΔY1(用@CL1表示)。
@CL1 ==ABSF( -@SL_m1*(ZR2 F1 S3 G2) - @b1 + (YR2 F1 S3 G2))
其中@表示定義變量,==表示賦值,ABSF( )表示絕對值函數(shù)。
2第二類空隙的計(jì)算
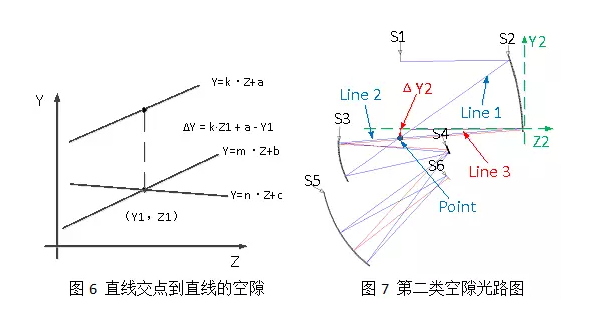
第二類空隙是指某視場上、下邊緣光線的交點(diǎn)到某邊緣光線的距離。如圖6所示,兩條相交直線的方程為Y=m·Z+b和Y=m·Z +c,另外一條直線的方程為Y=k·Z+a,交點(diǎn)坐標(biāo)為(Y1,Z1),則交點(diǎn)到直線的空隙為ΔY。
Z1 = (c - b)/(m - n)
Y1 = m(b - c)/(n - m)+ b (3)
ΔY = k·Z1 + a – Y1
圖2中序號3所指示的空隙可按照圖7所示的光路進(jìn)行計(jì)算。視場F3的子午上邊緣光線R2經(jīng)表面2反射后的光學(xué)為直線1(Line 1),視場F3的子午下邊緣光線R3經(jīng)表面S2反射后的光線為直線2(Line 2),視場F2下邊緣光線R3經(jīng)光闌面S1出射后的光線為直線3(Line 3)。
直線1(Line 1)和直線2(Line 2)的交點(diǎn)(Point)到直線3(Line 3)在Y向的距離就是空隙ΔY2。
根據(jù)公式(3),以表面S2的頂點(diǎn)為全局坐標(biāo)的原點(diǎn),按照軟件中的語法對空隙進(jìn)行如下計(jì)算。
3光學(xué)優(yōu)化中光線的約束
在光學(xué)優(yōu)化程序中,按照上述方法,嵌入空隙計(jì)算程序,對空隙的尺寸進(jìn)行控制,如@CL1 = 5,用來約束參考光線的位置和方向,實(shí)現(xiàn)對光學(xué)結(jié)構(gòu)的控制。光學(xué)設(shè)計(jì)軟件CODE V從10.6版開始加入@JMRCC函數(shù),可對離軸反射系統(tǒng)中的兩類空隙進(jìn)行計(jì)算,具體使用方法可參考軟件說明書。
3總結(jié)
光學(xué)系統(tǒng)的類型是千變?nèi)f化的,對結(jié)構(gòu)參數(shù)和光學(xué)特性要求也各有不同。光學(xué)設(shè)計(jì)軟件的功能不可能包羅萬象,在實(shí)際的光學(xué)設(shè)計(jì)中需要針對一些特殊的光學(xué)系統(tǒng),制定特殊的結(jié)構(gòu)參數(shù)和光學(xué)特性的要求,并可提出特殊的評價(jià)指標(biāo)用于光學(xué)結(jié)構(gòu)的優(yōu)化過程。深刻理解光線計(jì)算方法,熟練掌握軟件中的函數(shù)命令,通過編寫一些專用程序,將能更靈活地使用光學(xué)設(shè)計(jì)軟件。
轉(zhuǎn)載請注明出處。

 相關(guān)文章
相關(guān)文章
 熱門資訊
熱門資訊
 精彩導(dǎo)讀
精彩導(dǎo)讀















 關(guān)注我們
關(guān)注我們